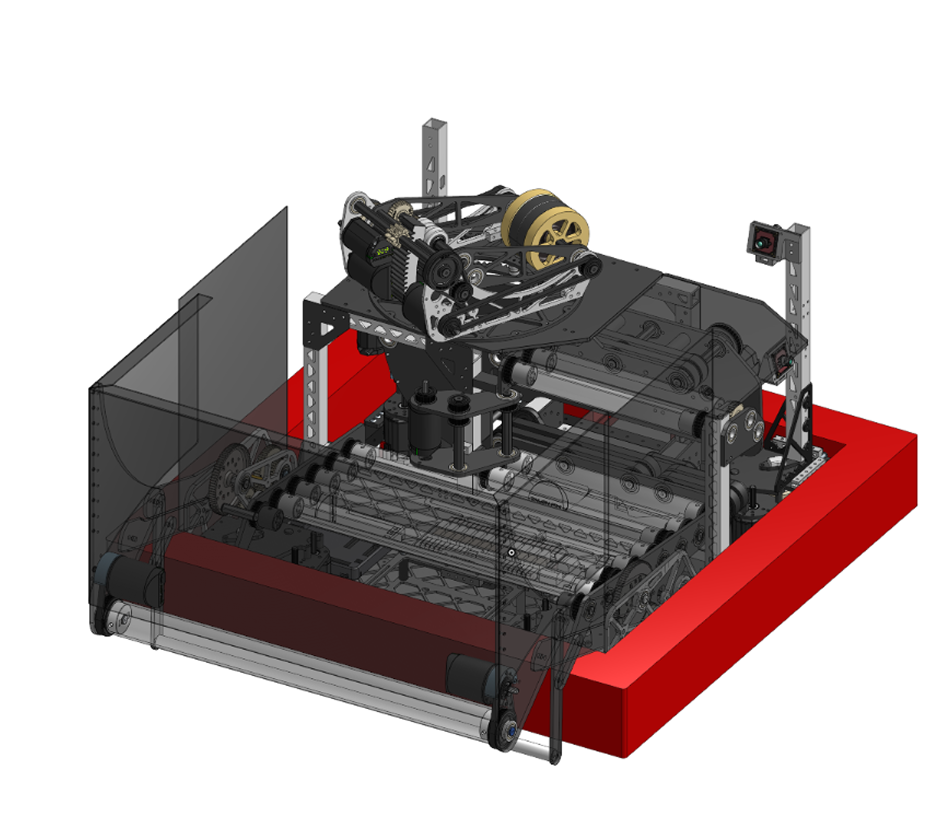
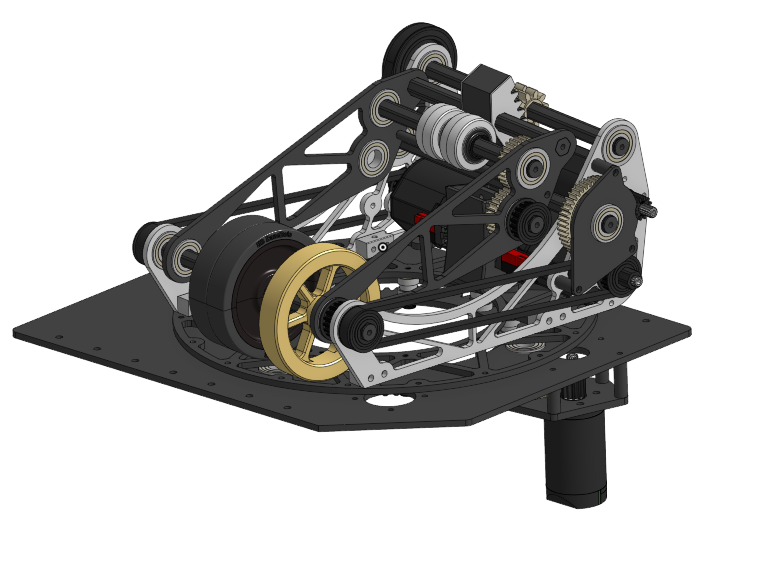
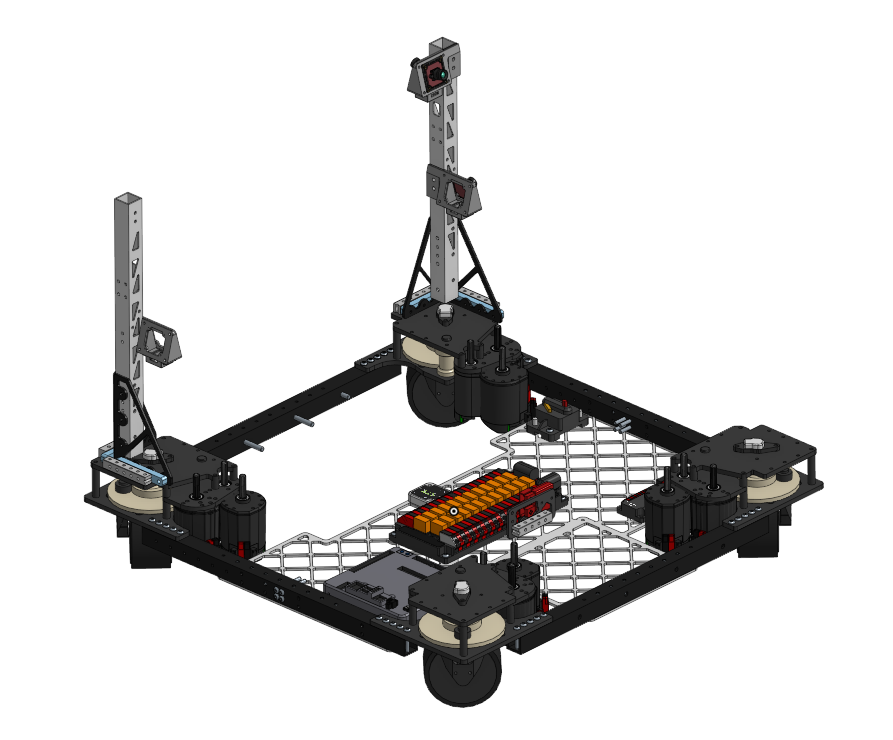
Rotates up to 360° independently of the drivetrain, allowing the robot to aim and shoot from any orientation.
Variable-Angle Hood
Adjusts the shot angle to support accurate scoring from multiple field distances.
Vision Auto-Aiming
Uses vision targeting to automatically detect goals and align the turret for accurate scoring.
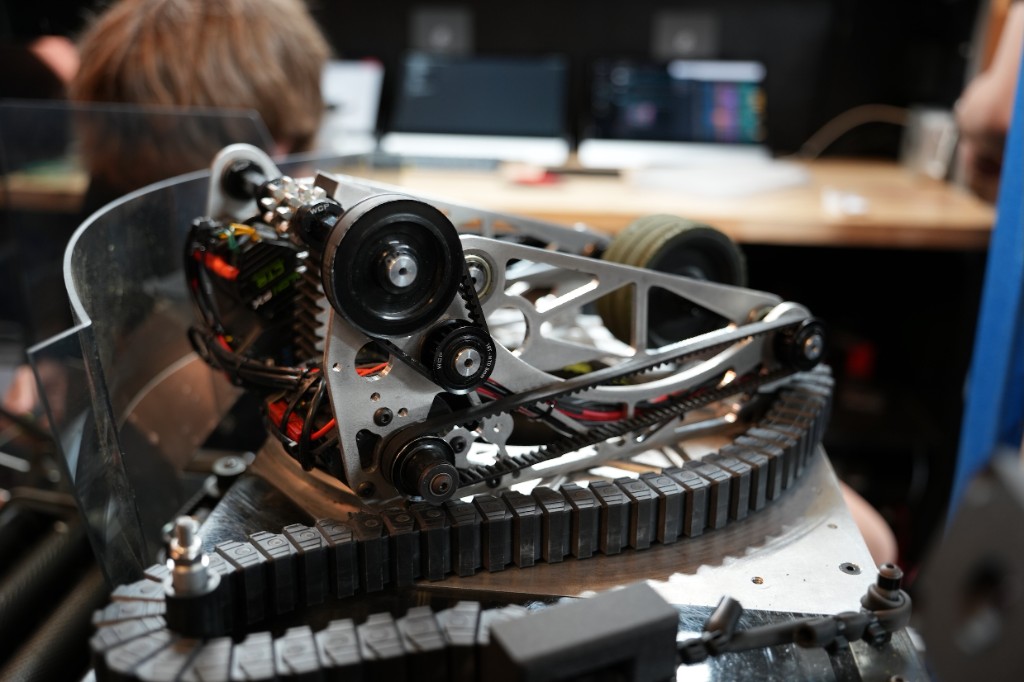
Dual-Wheel Flywheel System
Uses two 1.625-inch Colson wheels and two Banebots wheels powered by 2 Kraken X60 motors and 2 Kraken X44 motors, with 2 4-inch brass flywheels added to increase rotational inertia for more consistent shot velocity.
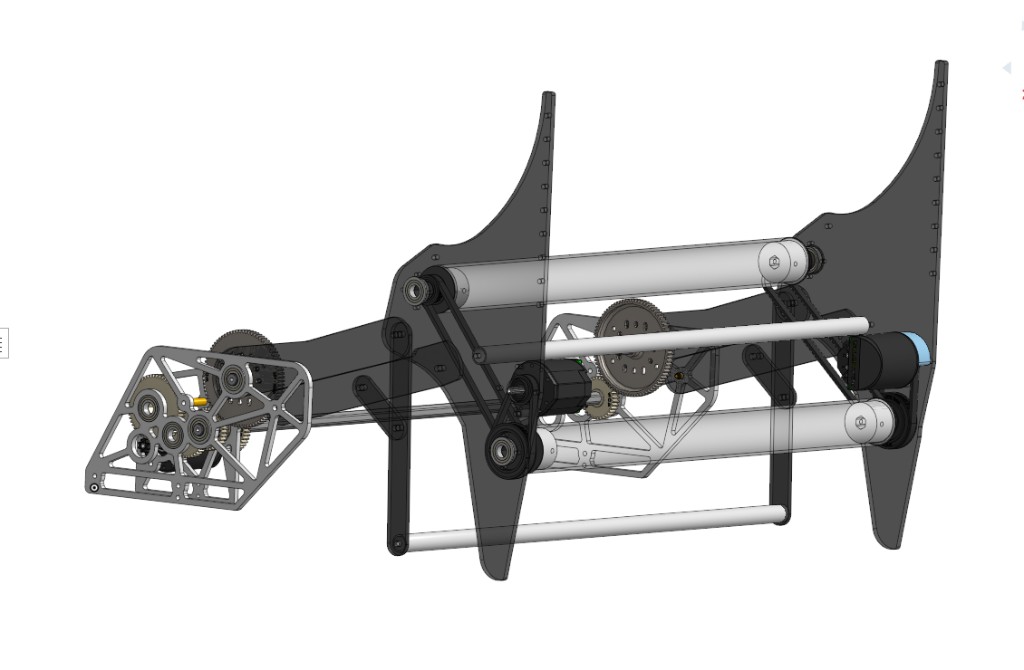
Intake
Four-Bar Hopper Expansion
Uses a four-bar linkage to expand the hopper and increase fuel storage capacity during operation.
Intake
Uses two Kraken X60 motors driving a 2-inch roller to capture and move fuel into the hopper.
High-Speed Collection
Collects up to 10 fuel per second to support rapid scoring cycles.
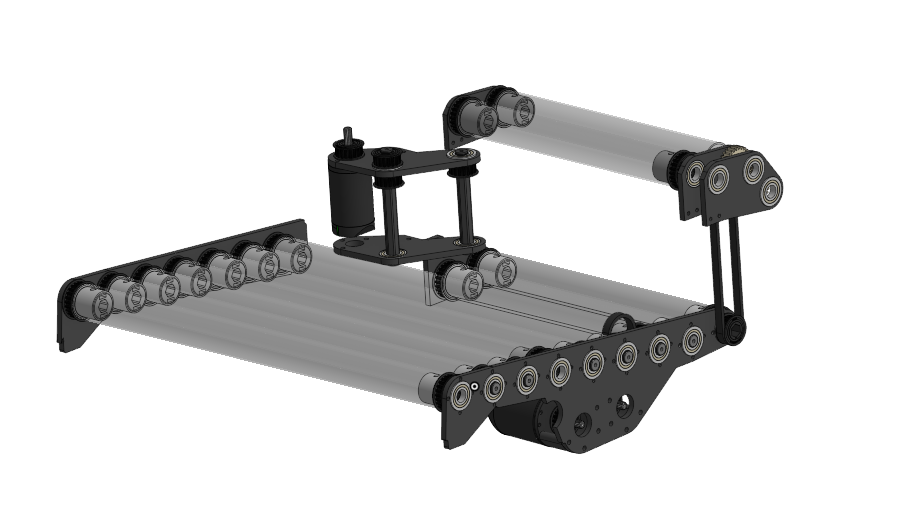
Feeder & Hopper Floor
Kraken X60 Drive
Uses Kraken X60 motors to power the feeder and hopper mechanisms for reliable fuel transfer.
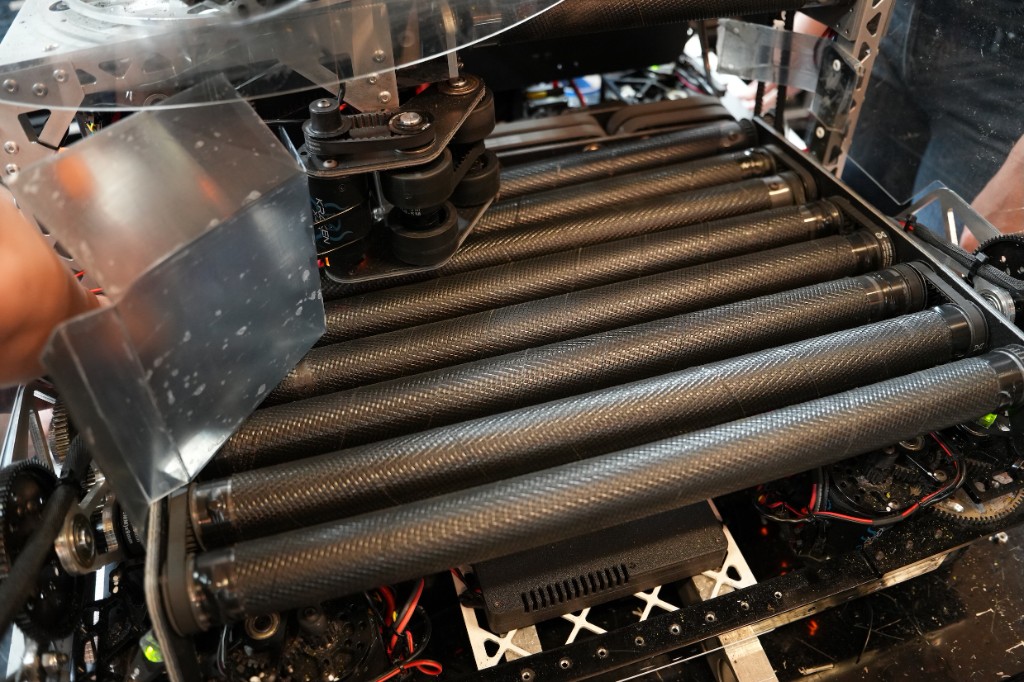
High-Speed Roller System
Uses seven 1.5-inch rollers with a surface speed of 43 ft/s to move fuel efficiently toward the feeder.
Active Tunnel Feeder
Uses a belt-driven tunnel system to serialize and shuttle fuel efficiently into the shooter for consistent feeding.
Drivetrain
Swerve Drive System
Uses an omnidirectional swerve drivetrain to enable precise movement in any direction without rotating the robot.
X2C Swerve Modules
Operates on WestCoast Products X2C modules, designed for high performance, simplified assembly, and improved drivetrain versatility.
High-Traction Wheels
Uses wider swerve wheels to improve traction and acceleration during fast maneuvers.
High-Speed Drive
Reaches a top speed of 16.1 ft/s using a 6.48:1 gear ratio.
Software
C++ Control Software
Uses C++ as the primary programming language for robot control and subsystem coordination.
Multi-Camera Vision System
Uses multiple cameras and custom computer vision software running on an onboard LattePanda single-board computer for real-time vision processing and field pose estimation.
Adaptive Shot Control
Uses vision-based pose estimation and a physics-based model to automatically adjust shooter velocity and hood angle while compensating for robot motion.
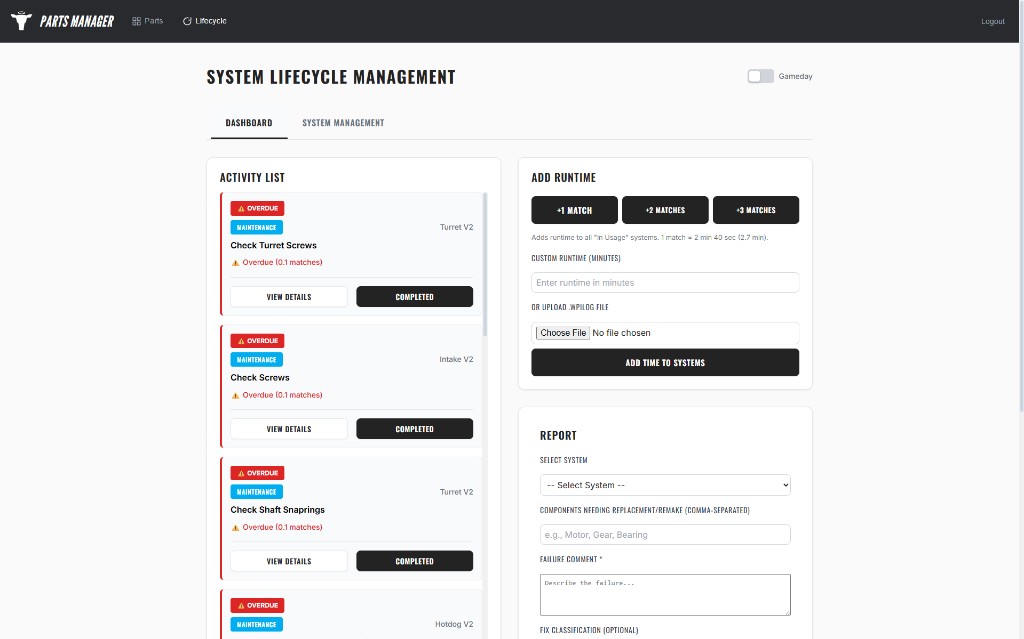
Lifecycle Management
Failure Tracking System
Tracks component failures to calculate mean time between failures (MTBF) and improve system reliability.
Predictive Maintenance
Uses failure data to generate maintenance schedules for critical robot systems.
Cycle & Runtime Monitoring
Tracks maximum part and assembly cycles along with subsystem runtime to guide preventative maintenance and replacements.
Dashboard / Activity List & Runtime Tracking
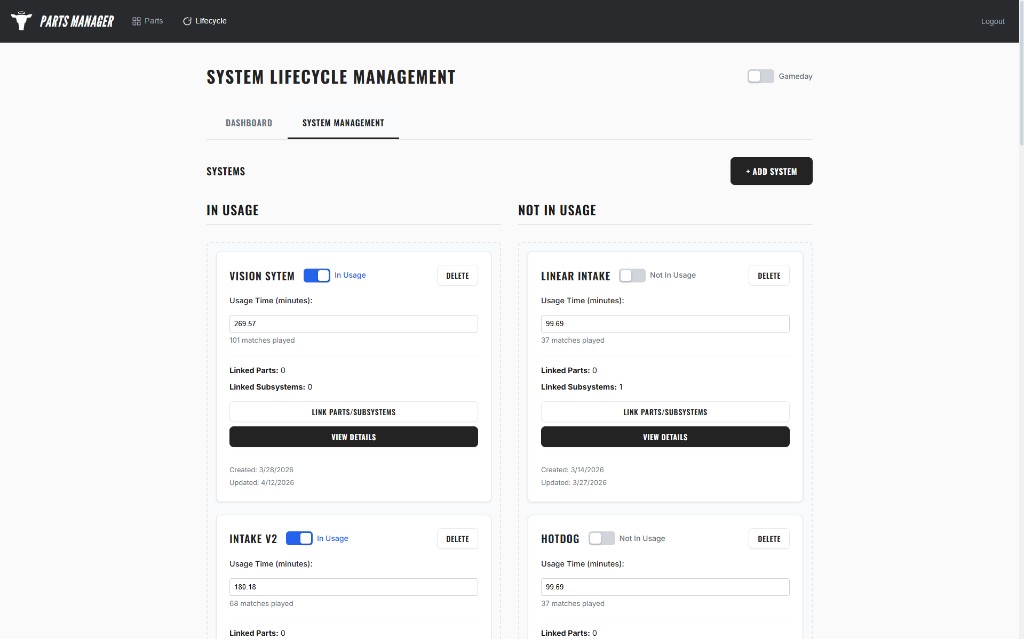
System Management / Subsystem Tracking
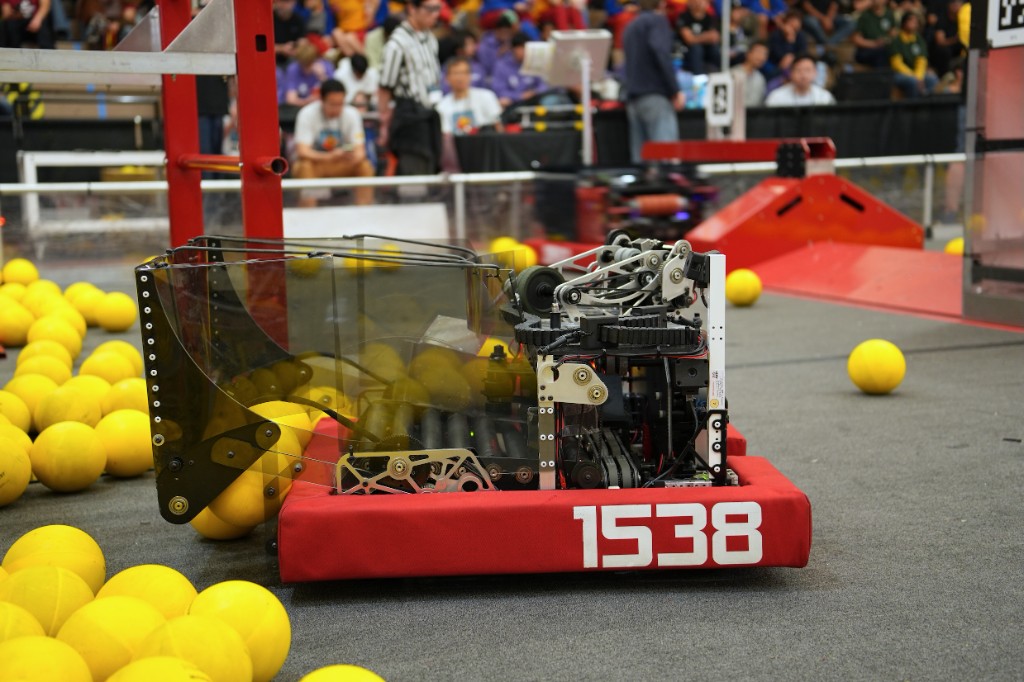
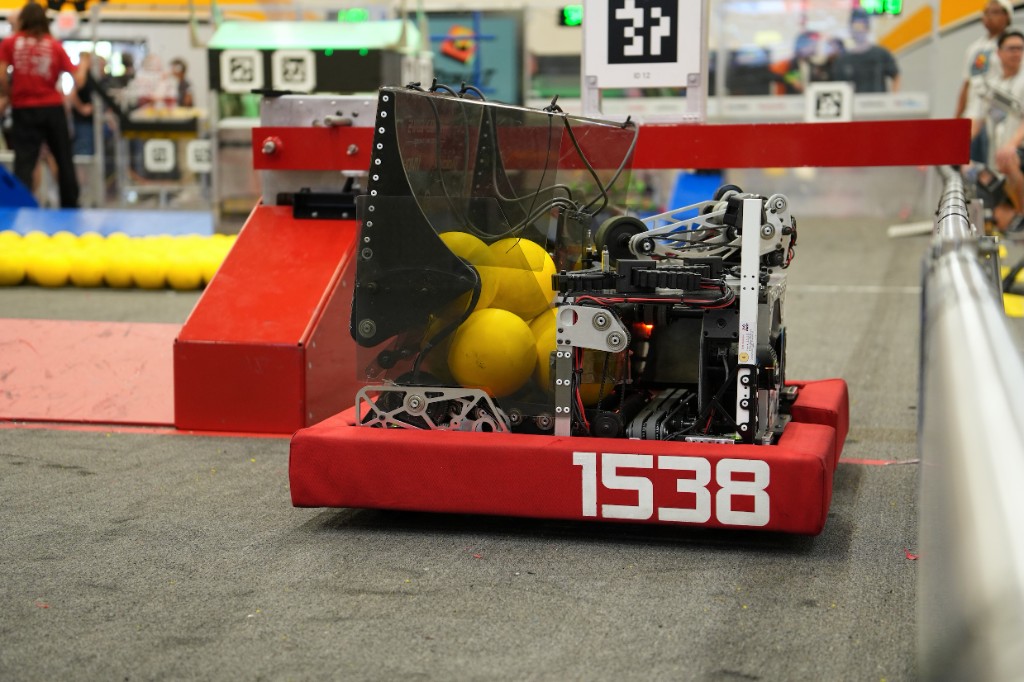
Gallery
2026 Season at a Glance
Official match and district performance through the 2026 FIRST California district season.